Code Reproducibility#
from torch_geometric.datasets import MoleculeNet
dataset = MoleculeNet(root='data/clintox', name='ClinTox')
print(f'Dataset: {dataset}\nNumber of molecules/graphs: {len(dataset)}\nNumber of classes: {dataset.num_classes}')
Dataset: ClinTox(1484)
Number of molecules/graphs: 1484
Number of classes: 2
/opt/hostedtoolcache/Python/3.12.5/x64/lib/python3.12/site-packages/torch_geometric/data/dataset.py:238: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
if osp.exists(f) and torch.load(f) != _repr(self.pre_transform):
/opt/hostedtoolcache/Python/3.12.5/x64/lib/python3.12/site-packages/torch_geometric/data/dataset.py:246: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
if osp.exists(f) and torch.load(f) != _repr(self.pre_filter):
/opt/hostedtoolcache/Python/3.12.5/x64/lib/python3.12/site-packages/torch_geometric/io/fs.py:215: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
return torch.load(f, map_location)
mols = dataset[26], dataset[83]
for m in mols:
print(m.smiles)
C([C@@H]1[C@H]([C@@H]([C@H]([C@H](O1)O[C@]2([C@H]([C@@H]([C@H](O2)CO)O)O)CO)O)O)O)O
C1[C@@H]([C@H]([C@@H]([C@H]([NH+]1CCO)CO)O)O)O
from rdkit import Chem
from rdkit.Chem.Draw import rdMolDraw2D
from IPython.display import SVG
smiles = [Chem.MolFromSmiles(m.smiles) for m in mols]
d2d = rdMolDraw2D.MolDraw2DSVG(600,280,300,280)
d2d.drawOptions().addAtomIndices = True
d2d.DrawMolecules(smiles)
d2d.FinishDrawing()
SVG(d2d.GetDrawingText())

for i,m in enumerate(mols):
print(f'Molecule {i+1}: Number of atoms={m.x.shape[0]}, Features per atom={m.x.shape[1]}')
Molecule 1: Number of atoms=23, Features per atom=9
Molecule 2: Number of atoms=14, Features per atom=9
d2d = rdMolDraw2D.MolDraw2DSVG(600,280,300,280)
d2d.drawOptions().addBondIndices = True
d2d.DrawMolecules(smiles)
d2d.FinishDrawing()
SVG(d2d.GetDrawingText())

import numpy as np
_process = lambda x: [e[0] for e in np.split(x, 2)]
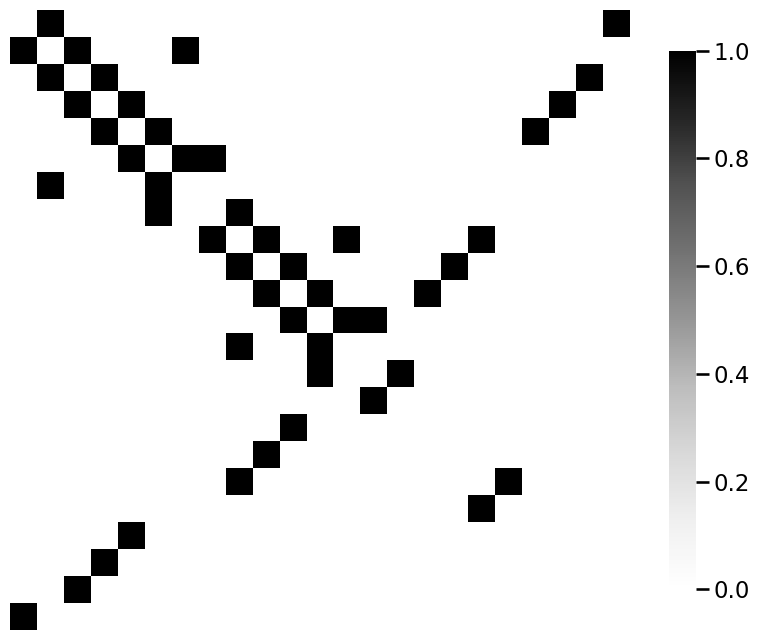
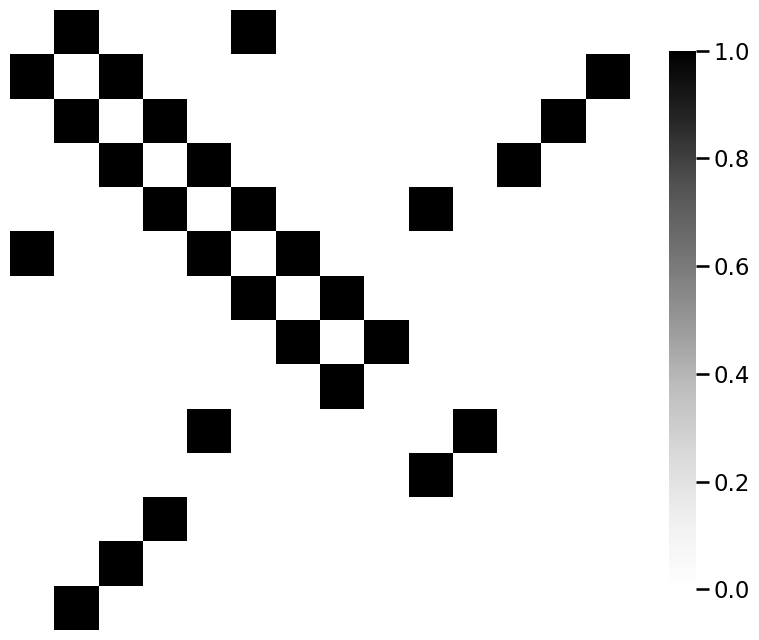
def adj_from_edgelist(molecule):
"""
A function that takes a molecule edgelist and produces an adjacency matrix.
"""
# the number of nodes is the number of atoms (rows of .x attribute)
n = molecule.x.shape[0]
# the adjacency matrix is n x n
A = np.zeros((n, n))
edgelist = m.edge_index.numpy()
# loop over the edges e_k, and for each edge, unpack the
# nodes that are incident it. for this pair of nodes,
# change the adjacency matrix entry to 1
for e_k, (i, j) in enumerate(zip(*_process(edgelist))):
A[i, j] = 1
return A
from graphbook_code import heatmap
for m_i, m in enumerate(mols):
A = adj_from_edgelist(m)
heatmap(A)
import torch
# for notebook reproducibility
torch.manual_seed(12345)
dataset = dataset.shuffle()
train_dataset = dataset[:-150]
test_dataset = dataset[-150:]
print(f'Number of training networks: {len(train_dataset)}')
print(f'Number of test networks: {len(test_dataset)}')
Number of training networks: 1334
Number of test networks: 150
from torch_geometric.loader import DataLoader
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False)
for step, data in enumerate(iter(train_loader)):
print(f'Step {step + 1}:')
print(f'Number of networks in the current batch: {data.num_graphs}')
print(data)
Step 1:
Number of networks in the current batch: 64
DataBatch(x=[1610, 9], edge_index=[2, 3460], edge_attr=[3460, 3], smiles=[64], y=[64, 2], batch=[1610], ptr=[65])
Step 2:
Number of networks in the current batch: 64
DataBatch(x=[1541, 9], edge_index=[2, 3318], edge_attr=[3318, 3], smiles=[64], y=[64, 2], batch=[1541], ptr=[65])
Step 3:
Number of networks in the current batch: 64
DataBatch(x=[1824, 9], edge_index=[2, 3868], edge_attr=[3868, 3], smiles=[64], y=[64, 2], batch=[1824], ptr=[65])
Step 4:
Number of networks in the current batch: 64
DataBatch(x=[1728, 9], edge_index=[2, 3666], edge_attr=[3666, 3], smiles=[64], y=[64, 2], batch=[1728], ptr=[65])
Step 5:
Number of networks in the current batch: 64
DataBatch(x=[1651, 9], edge_index=[2, 3502], edge_attr=[3502, 3], smiles=[64], y=[64, 2], batch=[1651], ptr=[65])
Step 6:
Number of networks in the current batch: 64
DataBatch(x=[1821, 9], edge_index=[2, 3886], edge_attr=[3886, 3], smiles=[64], y=[64, 2], batch=[1821], ptr=[65])
Step 7:
Number of networks in the current batch: 64
DataBatch(x=[1882, 9], edge_index=[2, 3972], edge_attr=[3972, 3], smiles=[64], y=[64, 2], batch=[1882], ptr=[65])
Step 8:
Number of networks in the current batch: 64
DataBatch(x=[1557, 9], edge_index=[2, 3294], edge_attr=[3294, 3], smiles=[64], y=[64, 2], batch=[1557], ptr=[65])
Step 9:
Number of networks in the current batch: 64
DataBatch(x=[1762, 9], edge_index=[2, 3746], edge_attr=[3746, 3], smiles=[64], y=[64, 2], batch=[1762], ptr=[65])
Step 10:
Number of networks in the current batch: 64
DataBatch(x=[1617, 9], edge_index=[2, 3468], edge_attr=[3468, 3], smiles=[64], y=[64, 2], batch=[1617], ptr=[65])
Step 11:
Number of networks in the current batch: 64
DataBatch(x=[1541, 9], edge_index=[2, 3278], edge_attr=[3278, 3], smiles=[64], y=[64, 2], batch=[1541], ptr=[65])
Step 12:
Number of networks in the current batch: 64
DataBatch(x=[1870, 9], edge_index=[2, 4018], edge_attr=[4018, 3], smiles=[64], y=[64, 2], batch=[1870], ptr=[65])
Step 13:
Number of networks in the current batch: 64
DataBatch(x=[1627, 9], edge_index=[2, 3464], edge_attr=[3464, 3], smiles=[64], y=[64, 2], batch=[1627], ptr=[65])
Step 14:
Number of networks in the current batch: 64
DataBatch(x=[1787, 9], edge_index=[2, 3822], edge_attr=[3822, 3], smiles=[64], y=[64, 2], batch=[1787], ptr=[65])
Step 15:
Number of networks in the current batch: 64
DataBatch(x=[1588, 9], edge_index=[2, 3392], edge_attr=[3392, 3], smiles=[64], y=[64, 2], batch=[1588], ptr=[65])
Step 16:
Number of networks in the current batch: 64
DataBatch(x=[1577, 9], edge_index=[2, 3356], edge_attr=[3356, 3], smiles=[64], y=[64, 2], batch=[1577], ptr=[65])
Step 17:
Number of networks in the current batch: 64
DataBatch(x=[1603, 9], edge_index=[2, 3460], edge_attr=[3460, 3], smiles=[64], y=[64, 2], batch=[1603], ptr=[65])
Step 18:
Number of networks in the current batch: 64
DataBatch(x=[1761, 9], edge_index=[2, 3770], edge_attr=[3770, 3], smiles=[64], y=[64, 2], batch=[1761], ptr=[65])
Step 19:
Number of networks in the current batch: 64
DataBatch(x=[1616, 9], edge_index=[2, 3428], edge_attr=[3428, 3], smiles=[64], y=[64, 2], batch=[1616], ptr=[65])
Step 20:
Number of networks in the current batch: 64
DataBatch(x=[1431, 9], edge_index=[2, 3064], edge_attr=[3064, 3], smiles=[64], y=[64, 2], batch=[1431], ptr=[65])
Step 21:
Number of networks in the current batch: 54
DataBatch(x=[1434, 9], edge_index=[2, 3074], edge_attr=[3074, 3], smiles=[54], y=[54, 2], batch=[1434], ptr=[55])
from torch import nn
from torch.nn import Linear
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
from torch_geometric.nn import global_mean_pool
torch.manual_seed(12345)
class GCN(nn.Module):
def __init__(self, hidden_channels):
super(GCN, self).__init__()
self.conv1 = GCNConv(dataset.num_node_features, hidden_channels)
self.conv2 = GCNConv(hidden_channels, hidden_channels)
self.conv3 = GCNConv(hidden_channels, hidden_channels)
self.lin = Linear(hidden_channels, dataset.num_classes, bias=False)
def forward(self, x, edge_index, batch):
# 1. Obtain node embeddings via convolutional layers
x = self.conv1(x, edge_index)
x = x.relu()
x = self.conv2(x, edge_index)
x = x.relu()
x = self.conv3(x, edge_index)
# 2. Readout layer to produce network embedding
x = global_mean_pool(x, batch) # [batch_size, hidden_channels]
# 3. Apply a prediction classifier to the network embedding
x = self.lin(x)
return x
model = GCN(hidden_channels=64)
print(model)
GCN(
(conv1): GCNConv(9, 64)
(conv2): GCNConv(64, 64)
(conv3): GCNConv(64, 64)
(lin): Linear(in_features=64, out_features=2, bias=False)
)
model = GCN(hidden_channels=64)
optimizer = torch.optim.Adam(model.parameters(), lr=0.0001)
criterion = torch.nn.CrossEntropyLoss()
def train():
model.train()
for data in train_loader: # Iterate in batches over the training dataset.
out = model(data.x.float(), data.edge_index, data.batch) # Perform a single forward pass.
# Handle a pyg bug where last element in batch may be all zeros and excluded in the model output.
# https://github.com/pyg-team/pytorch_geometric/issues/1813
num_batch = out.shape[0]
loss = criterion(out, data.y[:num_batch, 0].long()) # Compute the loss.
loss.backward() # Derive gradients.
optimizer.step() # Update parameters based on gradients.
optimizer.zero_grad() # Clear gradients.
def test(loader):
model.eval()
correct = 0
for data in loader: # Iterate in batches over the training/test dataset.
out = model(data.x.float(), data.edge_index, data.batch)
pred = out.argmax(dim=1) # Use the class with highest probability.
num_batch = pred.shape[0]
correct += int((pred == data.y[:num_batch, 0]).sum()) # Check against ground-truth labels.
return correct / len(loader.dataset) # Derive ratio of correct predictions.
R = 10 # number of epochs
for epoch in range(0, R):
train()
train_acc = test(train_loader)
test_acc = test(test_loader)
print(f'Epoch: {epoch:03d}, Train Acc: {train_acc:.4f}, Test Acc: {test_acc:.4f}')
Epoch: 000, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 001, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 002, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 003, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 004, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 005, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 006, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 007, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 008, Train Acc: 0.9310, Test Acc: 0.9600
Epoch: 009, Train Acc: 0.9310, Test Acc: 0.9600
import numpy as np
# define the node names
node_names = np.array(["SI", "MH", "BK", "Q", "BX"])
# define the adjacency matrix
A = np.array([[0,0,1,0,0], # Staten Island neighbors Brooklyn
[0,0,1,1,1], # Manhattan Neighbors all but Staten Island
[1,1,0,1,0], # Brooklyn neighbors all but Bronx
[0,1,1,0,1], # Queens neighbors all but Staten Island
[0,1,0,1,0]]) # Bronx neighbors Manhattan and Queens
# compute the degree of each node
di = A.sum(axis=0)
# the probability matrix is the adjacency divided by
# degree of the starting node
P = (A / di).T
x0 = np.array([0,1,0,0,0]) # x vector indicating we start at MH
ps0 = P.T @ x0 # p vector for timestep 1 starting at node MH at time 0
# choose the next node using the probability vector we calculated
next_node = np.random.choice(range(0, len(node_names)), p=ps0)
print(f"Next node: {node_names[next_node]:s}")
Next node: Q
p = 5 # return parameter
q = 1/2 # in-out parameter
bias_vector = np.ones(len(node_names))
bias_vector[node_names == "BX"] = 1/q
bias_vector[node_names == "BK"] = 1/p
xt = [0, 1, 0, 0, 0] # starting vector at MH
pst = P.T @ xt # probability vector is Pt*x
bias_factors = pst*bias_vector
biased_pst = bias_factors/bias_factors.sum()
# choose the next node using the second-order biased transition probability
next_node = np.random.choice(range(0, len(node_names)), p=biased_pst)
print(f"Next node: {node_names[next_node]:s}")
Next node: BX
from graphbook_code import dcsbm
nk = 100 # 100 nodes per community
zs = np.repeat([1, 2], nk)
B = np.array([[0.6, 0.3], [0.3, 0.6]])
theta = b = np.repeat([1, .2, 1, .2], nk // 2)
deg_map = {1: "Core", 0.2: "Per."}
zs_deg = [f"{deg_map[theta[i]]:s}" for i in range(len(theta))]
zs_aug = [f"{z:d}, {deg:s}" for z, deg in zip(zs, zs_deg)]
A, P = dcsbm(zs, theta, B, return_prob=True)
from graspologic.embed import node2vec_embed
import networkx as nx
p=1; q=10; T=200; r=500
d = 4
np.random.seed(0)
Xhat1, _ = node2vec_embed(nx.from_numpy_array(A),
return_hyperparameter=float(p), inout_hyperparameter=float(q),
dimensions=d, num_walks=r, walk_length=T)
p=1; q=1/10; T=200; r=500
d = 4
np.random.seed(0)
Xhat2, _ = node2vec_embed(nx.from_numpy_array(A), return_hyperparameter=float(p), inout_hyperparameter=float(q),
dimensions=d, num_walks=r, walk_length=T)